gtav-racebot-bc.ipynb
GTA V Racebot via Behavioural Cloning
This notebook trains a racebot for GTA V for a simple race track (https://www.gta5-mods.com/maps/formula-1-formula-e-circuit). We use behavioural cloning from imitation learning, in which the model learns a policy by mimicking the demonstrations (i.e., transforms the problem to a supervised learning problem). The states are defined as the speed of the car & raycast distances & the actions are discrete values for throttle & steering.
- EDA
- Train
- Conclusion
import pandas as pd
import numpy as np
import tensorflow as tf
from tensorflow import keras
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import StandardScaler
import matplotlib.pyplot as plt
2025-11-15 17:16:45.345169: E external/local_xla/xla/stream_executor/cuda/cuda_fft.cc:477] Unable to register cuFFT factory: Attempting to register factory for plugin cuFFT when one has already been registered
WARNING: All log messages before absl::InitializeLog() is called are written to STDERR
E0000 00:00:1763227005.608597 48 cuda_dnn.cc:8310] Unable to register cuDNN factory: Attempting to register factory for plugin cuDNN when one has already been registered
E0000 00:00:1763227005.683645 48 cuda_blas.cc:1418] Unable to register cuBLAS factory: Attempting to register factory for plugin cuBLAS when one has already been registered
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: 'MessageFactory' object has no attribute 'GetPrototype'
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: 'MessageFactory' object has no attribute 'GetPrototype'
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: 'MessageFactory' object has no attribute 'GetPrototype'
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: 'MessageFactory' object has no attribute 'GetPrototype'
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
AttributeError: 'MessageFactory' object has no attribute 'GetPrototype'
FILE_PATH = '/kaggle/input/racing-data-bc-1/racing_data_20251111_115450.csv'
1. EDA
We must look for imbalances in the labels, since the track has long straights, our data will have less turn data.
df = pd.read_csv(FILE_PATH, index_col=False)
print(f"Samples: {len(df)}")
print(df.head())
print(df.describe())
Samples: 84286
speed ray_0 ray_1 ray_2 ray_3 ray_4 ray_5 ray_6 \
0 0.006423 13.3434 17.9467 33.5831 79.1044 29.4587 15.6063 11.5635
1 0.006048 13.3434 17.9468 33.5835 79.1041 29.4584 15.6063 11.5635
2 0.006314 13.3434 17.9467 33.5832 79.1041 29.4584 15.6063 11.5635
3 0.006494 13.3434 17.9467 33.5832 79.1044 29.4587 15.6063 11.5635
4 0.006364 13.3434 17.9467 33.5832 79.1044 29.4587 15.6063 11.5635
steering throttle
0 0.0 0.0
1 0.0 0.0
2 0.0 0.0
3 0.0 0.0
4 0.0 0.0
speed ray_0 ray_1 ray_2 ray_3 \
count 84286.000000 84286.000000 84286.000000 84286.000000 84286.000000
mean 40.815017 13.415752 18.091388 42.415051 87.546020
std 5.639448 9.768494 10.486268 24.504446 32.479647
min 0.003145 2.576450 3.434760 6.310280 19.345600
25% 38.041825 10.125800 13.935925 27.932875 54.100275
50% 41.566050 12.135500 16.617450 33.378150 93.782500
75% 44.620075 14.150575 19.061475 44.901200 120.000000
max 51.009200 120.000000 120.000000 120.000000 120.000000
ray_4 ray_5 ray_6 steering throttle
count 84286.000000 84286.000000 84286.000000 84286.000000 84286.000000
mean 33.908074 16.857788 12.871764 -0.074980 0.855378
std 16.383217 4.444279 5.221268 0.405839 0.334569
min 8.011750 4.165840 3.043060 -1.000000 0.000000
25% 26.174450 14.105825 10.438725 0.000000 1.000000
50% 29.137350 16.105800 12.016250 0.000000 1.000000
75% 34.616525 19.263150 14.863150 0.000000 1.000000
max 120.000000 70.365300 120.000000 1.000000 1.000000
df = df[df['speed'] > 5.0] # get rid of crashes or stationary
print(f"Samples: {len(df)}")
Samples: 84133
print(f"Left turns (< -0.1): {(df['steering'] < -0.1).sum()}")
print(f"Straight (±0.1): {(df['steering'].abs() <= 0.1).sum()}")
print(f"Right turns (> 0.1): {(df['steering'] > 0.1).sum()}")
Left turns (< -0.1): 15491
Straight (±0.1): 59781
Right turns (> 0.1): 8861
straight = df[df['steering'].abs() < 0.1]
turning = df[df['steering'].abs() >= 0.1]
if len(straight) > len(turning) * 2:
straight_sampled = straight.sample(n=len(turning) * 2, random_state=42)
df = pd.concat([straight_sampled, turning])
df = df.sample(frac=1, random_state=42).reset_index(drop=True)
print(f"After balancing: {len(df)}")
After balancing: 73056
throttle_on = df[df['throttle'] > 0.1]
throttle_off = df[df['throttle'] <= 0.1]
if len(throttle_on) > len(throttle_off) * 2:
throttle_on_sampled = throttle_on.sample(n=len(throttle_off) * 2, random_state=42)
df = pd.concat([throttle_on_sampled, throttle_off])
print(f"After balancing: {len(df)}")
After balancing: 27606
2. Training
We will create a simple MLP w/ just 2 layers.
X = df[['speed', 'ray_0', 'ray_1', 'ray_2', 'ray_3', 'ray_4', 'ray_5', 'ray_6']].values
y = df[['steering', 'throttle']].values
scaler_X = StandardScaler()
X_scaled = scaler_X.fit_transform(X)
print(scaler_X.mean_)
print(scaler_X.scale_)
[40.31387887 13.3171938 17.94204432 44.73560258 77.80768833 35.56498163
16.78186832 12.84412013]
[ 5.47637981 9.25261478 9.72122038 24.71908633 32.80978699 18.13965501
4.19510602 5.41073173]
import joblib
joblib.dump(scaler_X, 'scaler.pkl')
print(scaler_X.mean_)
print(scaler_X.scale_)
[40.31387887 13.3171938 17.94204432 44.73560258 77.80768833 35.56498163
16.78186832 12.84412013]
[ 5.47637981 9.25261478 9.72122038 24.71908633 32.80978699 18.13965501
4.19510602 5.41073173]
X_train, X_test, y_train, y_test = train_test_split(
X_scaled, y, test_size=0.2, random_state=42
)
model = keras.Sequential([
keras.layers.Input(shape=(8,)), # speed + 7 rays
keras.layers.Dense(64, activation='relu'),
keras.layers.Dropout(0.3),
keras.layers.Dense(64, activation='relu'),
keras.layers.Dropout(0.2),
# tanh for steering (-1 to 1), sigmoid for throttle (0 to 1)
keras.layers.Dense(2, activation='linear') # we'll split outputs
])
model.compile(
optimizer=keras.optimizers.Adam(learning_rate=0.001),
loss='mse',
metrics=['mae']
)
model.summary()
Model: "sequential_2"
┏━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━┓ ┃ Layer (type) ┃ Output Shape ┃ Param # ┃ ┡━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━┩ │ dense_6 (Dense) │ (None, 64) │ 576 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dropout_4 (Dropout) │ (None, 64) │ 0 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dense_7 (Dense) │ (None, 64) │ 4,160 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dropout_5 (Dropout) │ (None, 64) │ 0 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dense_8 (Dense) │ (None, 32) │ 2,080 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dropout_6 (Dropout) │ (None, 32) │ 0 │ ├─────────────────────────────────┼────────────────────────┼───────────────┤ │ dense_9 (Dense) │ (None, 2) │ 66 │ └─────────────────────────────────┴────────────────────────┴───────────────┘
Total params: 6,882 (26.88 KB)
Trainable params: 6,882 (26.88 KB)
Non-trainable params: 0 (0.00 B)
early_stop = keras.callbacks.EarlyStopping(
monitor='val_loss',
patience=5,
restore_best_weights=True
)
history = model.fit(
X_train, y_train,
validation_data=(X_test, y_test),
epochs=50,
batch_size=64,
callbacks=[early_stop],
verbose=1
)
Epoch 1/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m3s[0m 3ms/step - loss: 0.2429 - mae: 0.3737 - val_loss: 0.1314 - val_mae: 0.2881
Epoch 2/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1481 - mae: 0.3034 - val_loss: 0.1221 - val_mae: 0.2713
Epoch 3/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1324 - mae: 0.2827 - val_loss: 0.1157 - val_mae: 0.2683
Epoch 4/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1265 - mae: 0.2729 - val_loss: 0.1093 - val_mae: 0.2550
Epoch 5/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1186 - mae: 0.2585 - val_loss: 0.1049 - val_mae: 0.2390
Epoch 6/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1158 - mae: 0.2523 - val_loss: 0.1029 - val_mae: 0.2391
Epoch 7/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1135 - mae: 0.2489 - val_loss: 0.1007 - val_mae: 0.2273
Epoch 8/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1105 - mae: 0.2426 - val_loss: 0.0989 - val_mae: 0.2279
Epoch 9/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1085 - mae: 0.2389 - val_loss: 0.0972 - val_mae: 0.2190
Epoch 10/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1065 - mae: 0.2367 - val_loss: 0.0977 - val_mae: 0.2284
Epoch 11/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1047 - mae: 0.2334 - val_loss: 0.0952 - val_mae: 0.2186
Epoch 12/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1069 - mae: 0.2360 - val_loss: 0.0948 - val_mae: 0.2224
Epoch 13/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1029 - mae: 0.2297 - val_loss: 0.0936 - val_mae: 0.2166
Epoch 14/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1013 - mae: 0.2267 - val_loss: 0.0930 - val_mae: 0.2118
Epoch 15/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1023 - mae: 0.2282 - val_loss: 0.0930 - val_mae: 0.2073
Epoch 16/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1021 - mae: 0.2272 - val_loss: 0.0917 - val_mae: 0.2050
Epoch 17/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.1000 - mae: 0.2232 - val_loss: 0.0906 - val_mae: 0.2046
Epoch 18/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0994 - mae: 0.2233 - val_loss: 0.0906 - val_mae: 0.2009
Epoch 19/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0998 - mae: 0.2223 - val_loss: 0.0901 - val_mae: 0.2041
Epoch 20/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0992 - mae: 0.2223 - val_loss: 0.0904 - val_mae: 0.2074
Epoch 21/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0960 - mae: 0.2177 - val_loss: 0.0898 - val_mae: 0.2002
Epoch 22/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0968 - mae: 0.2183 - val_loss: 0.0901 - val_mae: 0.2064
Epoch 23/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0980 - mae: 0.2209 - val_loss: 0.0891 - val_mae: 0.2014
Epoch 24/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0967 - mae: 0.2191 - val_loss: 0.0894 - val_mae: 0.2065
Epoch 25/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0980 - mae: 0.2199 - val_loss: 0.0882 - val_mae: 0.1997
Epoch 26/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0972 - mae: 0.2193 - val_loss: 0.0877 - val_mae: 0.1980
Epoch 27/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0961 - mae: 0.2181 - val_loss: 0.0885 - val_mae: 0.2036
Epoch 28/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0959 - mae: 0.2183 - val_loss: 0.0873 - val_mae: 0.1999
Epoch 29/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0965 - mae: 0.2185 - val_loss: 0.0873 - val_mae: 0.1959
Epoch 30/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0941 - mae: 0.2147 - val_loss: 0.0875 - val_mae: 0.1998
Epoch 31/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0961 - mae: 0.2172 - val_loss: 0.0864 - val_mae: 0.1936
Epoch 32/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0938 - mae: 0.2133 - val_loss: 0.0869 - val_mae: 0.1994
Epoch 33/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0934 - mae: 0.2137 - val_loss: 0.0860 - val_mae: 0.2001
Epoch 34/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0933 - mae: 0.2137 - val_loss: 0.0862 - val_mae: 0.1978
Epoch 35/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0934 - mae: 0.2136 - val_loss: 0.0870 - val_mae: 0.2000
Epoch 36/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0941 - mae: 0.2151 - val_loss: 0.0867 - val_mae: 0.1952
Epoch 37/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0943 - mae: 0.2153 - val_loss: 0.0863 - val_mae: 0.2031
Epoch 38/50
[1m346/346[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m1s[0m 3ms/step - loss: 0.0943 - mae: 0.2152 - val_loss: 0.0868 - val_mae: 0.1982
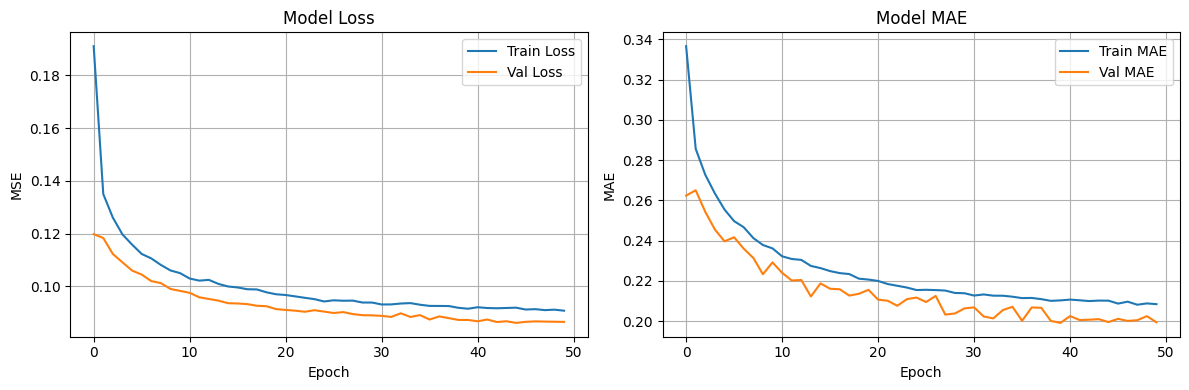
3. Conclusion
These values are expected.
y_pred = model.predict(X_test)
y_pred_steering = np.tanh(y_pred[:, 0]) # Steering: -1 to 1
y_pred_throttle = np.clip(y_pred[:, 1], 0, 1) # Throttle: 0 to 1
y_pred_final = np.column_stack([y_pred_steering, y_pred_throttle])
steering_mae = np.mean(np.abs(y_test[:, 0] - y_pred_final[:, 0]))
throttle_mae = np.mean(np.abs(y_test[:, 1] - y_pred_final[:, 1]))
print(f"Steering MAE: {steering_mae:.4f}")
print(f"Throttle MAE: {throttle_mae:.4f}")
[1m173/173[0m [32m━━━━━━━━━━━━━━━━━━━━[0m[37m[0m [1m0s[0m 1ms/step
Steering MAE: 0.2397
Throttle MAE: 0.1614
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.plot(history.history['loss'], label='Train Loss')
plt.plot(history.history['val_loss'], label='Val Loss')
plt.title('Model Loss')
plt.xlabel('Epoch')
plt.ylabel('MSE')
plt.legend()
plt.grid(True)
plt.subplot(1, 2, 2)
plt.plot(history.history['mae'], label='Train MAE')
plt.plot(history.history['val_mae'], label='Val MAE')
plt.title('Model MAE')
plt.xlabel('Epoch')
plt.ylabel('MAE')
plt.legend()
plt.grid(True)
plt.tight_layout()
plt.savefig('training_history.png')
plt.show()
model.save("model.keras")